

The project
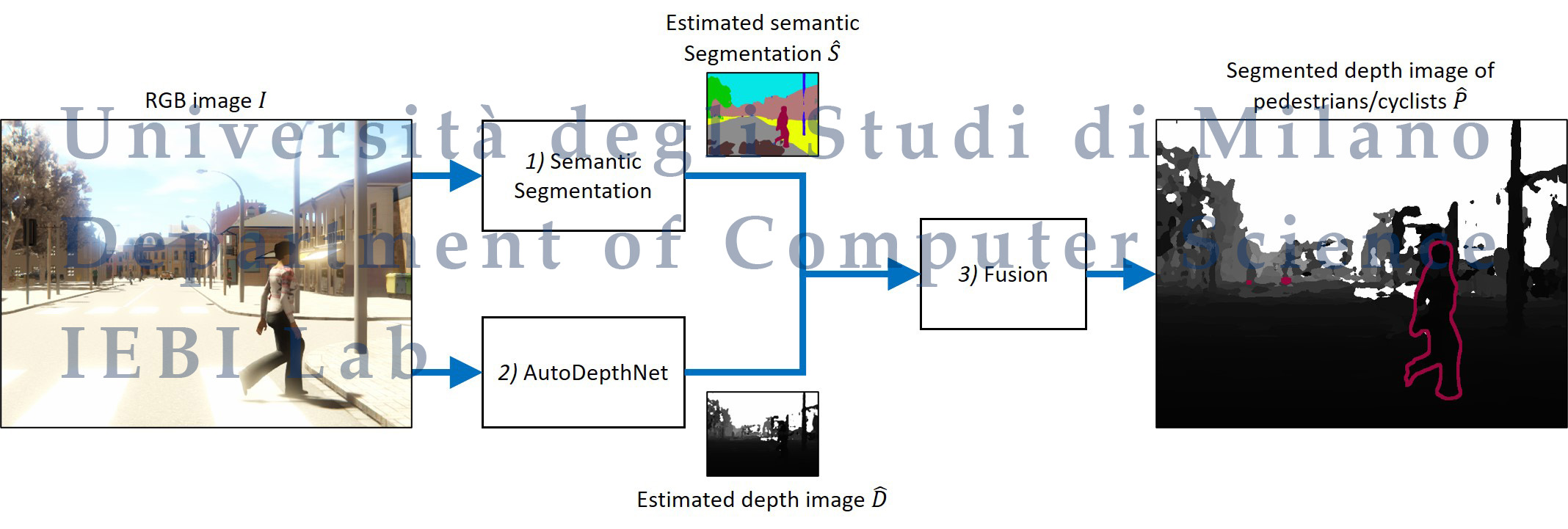
Automotive companies are investing a relevant amount of resources for designing autonomous driving systems, driver assistance technologies, and systems for assessing the driver’s attention. In this context, an important application consists of technologies for estimating the object distances in the scene, with a specific focus on pedestrians/cyclists. These technologies are usually based on LiDAR scanners, which estimate a depth map representing the distances between the vehicle and the surrounding objects. To obtain highly accurate distance estimations in autonomous driving applications, methods based on Deep Learning (DL) and Convolutional Neural Networks (CNN) are being increasingly used, considering either RGB images or LiDAR scans. However, LiDAR scanners require dedicated sensors, high costs, and post-processing algorithms to estimate a dense depth map. In this paper, we propose the first method in the literature able to estimate the distances of pedestrians/cyclists from the vehicle by using only an RGB image and CNNs, without the need for any LiDAR scanner or any device designed for the three-dimensional reconstruction of the scene. We evaluated our approach on a public dataset of RGB images captured in an automotive scenario, with results confirming the feasibility of the proposed method.
Downloads
The algorithms described on the paper are based on the public implementations of the ResNet50, PPM, and UperNet CNNs, available at:
https://github.com/CSAILVision/semantic-segmentation-pytorch
Related publication
-
A. Genovese, V. Piuri, F. Rundo, F. Scotti, and C. Spampinato, "Driver attention assistance by pedestrian/cyclist distance estimation from a single RGB Image: A CNN-based semantic segmentation approach", in Proc. of the 22nd IEEE Int. Conf. on Industrial Technology (ICIT 2021), Valencia, Spain, March 10-12, 2021, pp. 875-880. ISBN: 978-1-7281-5730-6. [DOI: 10.1109/ICIT46573.2021.9453567] [PDF] [BibTex entry]
Citation
@InProceedings {icit21,
author = {A. Genovese and V. Piuri and F. Rundo and F. Scotti and C. Spampinato},
booktitle = {Proc. of the 22nd IEEE Int. Conf. on Industrial Technology (ICIT 2021)},
title = {Driver attention assistance by pedestrian/cyclist distance estimation from a single RGB Image: A CNN-based semantic segmentation approach},
address = {Valencia, Spain},
pages = {875-880},
month = {March},
day = {10-12},
year = {2021},
note = {978-1-7281-5730-6}
}
Acknowledgements
We gratefully acknowledge the support of NVIDIA Corporation with the donation of the Titan X Pascal GPU used for this research, within the project "Deep Learning and CUDA for advanced and less-constrained biometric systems".
People
- Angelo Genovese (proposer and maintainer), angelo.genovese AT unimi.it
- Vincenzo Piuri, vincenzo.piuri AT unimi.it
- Francesco Rundo, francesco.rundo AT st.com
- Fabio Scotti, fabio.scotti AT unimi.it
- Concetto Spampinato, concetto.spampinato AT dieei.unict.it