Volume estimation using CCD cameras
Link to source code (Matlab):
[GitHub]
The estimation of the volume occupied by an object is an important task in the fields of granulometry, quality control, and archaeology. An accurate and well know technique for the volume measurement is based on the Archimedes principle. However, in many applications it is not possible to use this technique and faster contact-less techniques based on image processing or laser scanning should be adopted.
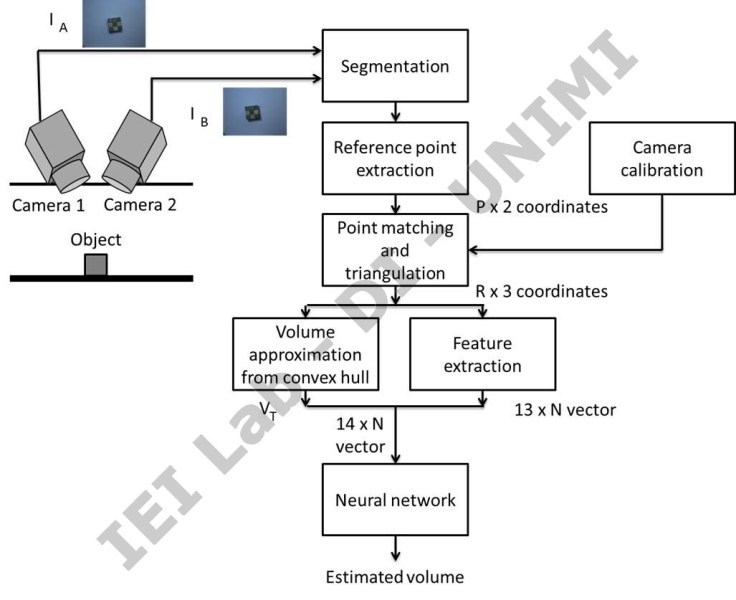
A low-cost approach for the volume estimation of different kinds of objects by using a two-view vision approach has been studied. The method first computes a reduced three-dimensional model from a single couple of images, then extracts a series of features from the obtained model. Lastly, the features are processed using a computational intelligence approach, which is able to learn the relation between the features and the volume of the captured object, in order to estimate the volume independently of its position and angle, and without computing a full three-dimensional model.
Results show that the approach is feasible and can obtain an accurate volume estimation. Compared to the direct computation of the volume from the three-dimensional models, the approach is more accurate and also less dependent to the position and angle of the measured objects with respect to the cameras.
Schema of the volume estimation approach
References
-
R. Donida Labati, A. Genovese,
V.
Piuri, F. Scotti, "Low-cost volume estimation by two-view acquisitions: a computational intelligence approach", in Proc. of the 2012 IEEE-INNS Int. Joint Conf. on Neural Networks (IJCNN 2012), Brisbane, QLD, Australia, pp. 1092-1099, June 10-15, 2012. ISBN: 978-1-4673-1489-3. [DOI: 10.1109/IJCNN.2012.6252515][PDF]